3.1 控制板载LED灯闪烁
在上一节中,我们学习了如何搭建开发环境,并实现了运行程序控制板载LED闪烁,在这一节中我们将学习这部分程序是如何实现LED控制的。
一、学习目标
1. 学习树莓派Pico 2/Pico主板的引脚基本使用。
2. 了解如何控制板载的LED灯。
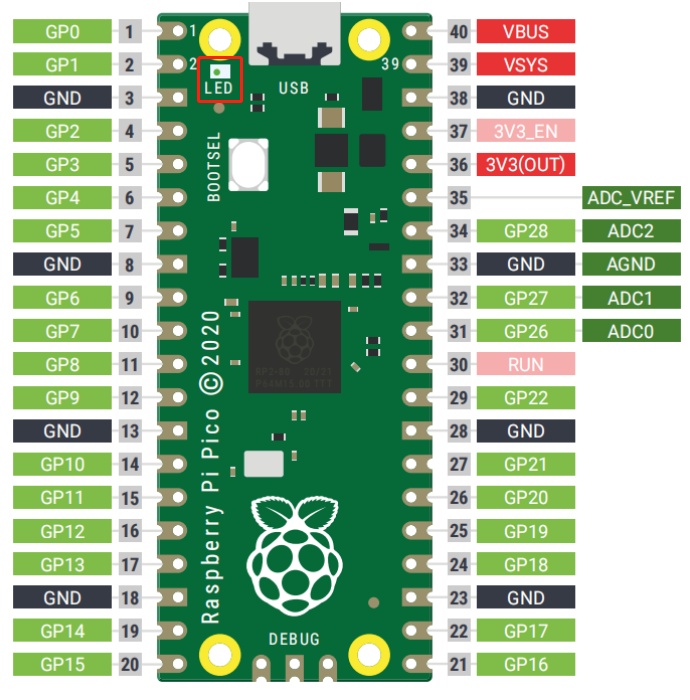
二、硬件使用
本次课程无需额外的硬件,直接利用树莓派Pico 2/Pico主板上的板载LED灯即可。(Pico 2/Pico板上的LED位置相同)
三、程序分析
完整程序位置:Pico Robot配套资料 -> 附件 -> 课程程序源码 -> 1.基础课程 -> 1.板载LED灯.py
关于ThonnyIDE的使用,请查看第二章课程。
ximport machineimport timeled_onboard = machine.Pin(25, machine.Pin.OUT)while True:led_onboard.value(1)time.sleep(1)led_onboard.value(0)time.sleep(1)
import machine
机器库包含MicroPython需要与Pico和其他MicroPython兼容的设备通信的所有指令,扩展了物理计算的语言。
import time
“time”库。 这个库处理所有与时间有关的事情,从测量它到将延迟插入到程序中。单位为秒。
led_onboard = machine.Pin(25, machine.Pin.OUT)
第一个参数,25,是您正在设置的引脚的数量;第二个参数,machine.Pin.OUT告诉Pico,引脚应该用作输出而不是输入。
time.sleep(1)
这会从time库调用sleep函数,这会使程序暂停您键入的任何秒数——在本例中为1秒。
四、实验现象
程序下载完成之后,我们可以看到树莓派Pico 2/Pico开发板上的LED灯每隔1秒闪烁。